版本 2022.45.15
2023 年 4 月 8 日发布
FSD 测试版 v11.3.6
包括 2022.45.15
- 在高速公路上启用 FSD 测试版。这将统一公路和非公路上的视觉和规划堆栈,并取代使用已超过四年的传统公路堆栈。传统的高速公路堆栈仍然依赖于多个单摄像头和单帧网络,其设置是为了处理简单的车道特定操作。FSD Beta 的多摄像头视频网络和下一代计划器可实现更复杂的代理互动,减少对车道的依赖,从而增加更多智能行为,实现更流畅的控制和更好的决策。
- 通过从车队中挖掘出的额外 3 万个自动标记片段,将近距离剐蹭情况的召回率提高了 15%,尤其是在大型卡车和高偏航率情况下。此外,还扩展并调整了针对剐蹭对象的专用速度控制。
- 在宽阔的车道上改善自我的位置,向即将转弯的方向倾斜,让其他车辆可以绕过自我。
- 通过车道偏移,在高曲率或大型卡车的情况下提高操控性,以保持与道路上其他车辆的安全距离,并提高舒适性。
- 改进了在车流密集的情况下改变路径堵塞车道的行为。现在,Ego 会在受阻车道上保持更长的车距,以对冲密集车流中可能出现的空隙。
- 通过在对齐阶段允许更高的加速度,改进了密集交通情况下的变道。这样就能更自然地选择间隙,在非常接近自我的情况下超越相邻车道的车辆。
- 通过提高车道、线路和道路边缘预测之间的检测一致性,使转弯更加顺畅。这是通过将最新版本的车道引导模块集成到道路边缘和线路网络中实现的。
- 提高了检测其他车辆移动语义的准确性。在其他车辆转为行驶的情况下,精确度提高了 23%;在自动驾驶汽车错误地将其领头车辆检测为停车的情况下,错误率降低了 12%。这些都是通过增加网络中的视频上下文、添加这些场景的更多数据以及增加控制相关车辆的损失惩罚来实现的。
- 扩展了最大轨迹优化范围,使高速行驶时对高曲率道路和远距离车辆的控制更加平稳。
- 在狭窄车道上靠近一排停放的汽车时,驾驶行为有所改善,宁愿偏离车道并保持在车道内行驶,而不是不必要地变道或减速。
- 通过更好地融合视觉定位和粗略地图车道计数,改进背靠背变道操作。
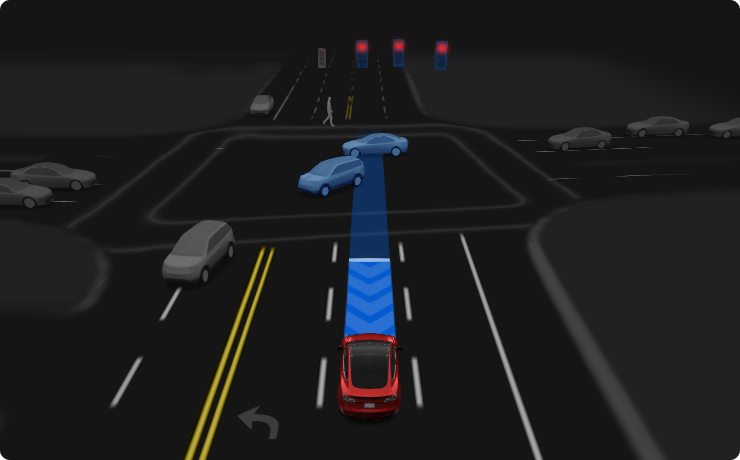
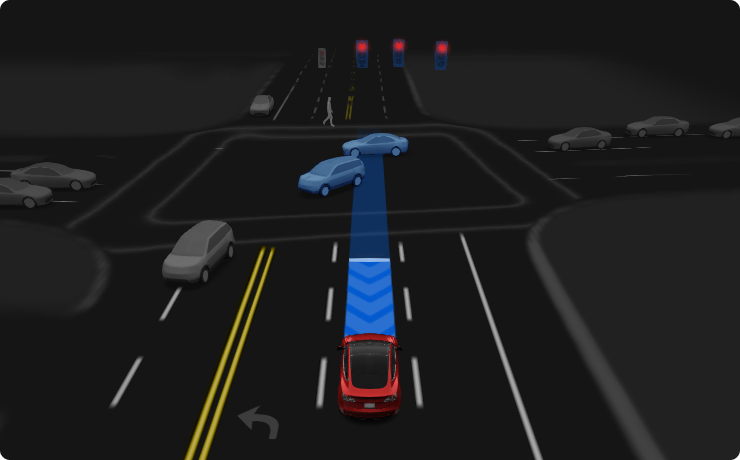
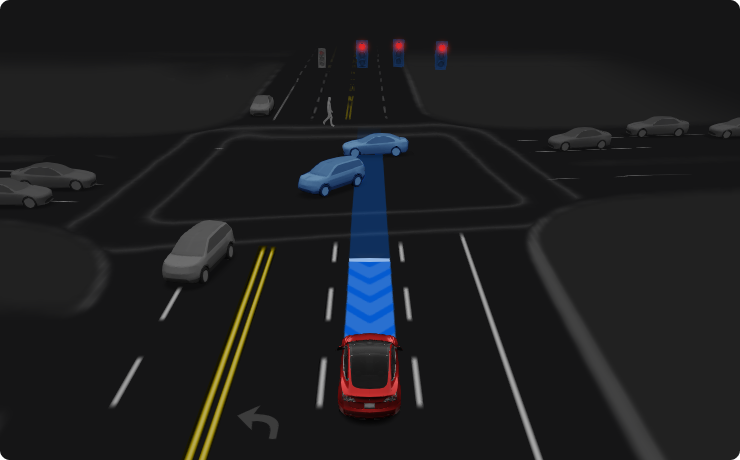
- 在用户界面中添加了文字提示,以传达 FSD Beta 计划即将进行的操作。还改进了车辆沿途即将发生的减速的可视化效果。雪佛龙会以不同的不透明度和速度呈现,以显示减速的强度,而实线则会出现在车辆即将停止的位置。
- 提高了物体检测的召回率和精确度,特别是将半挂卡车的位置误差降低了 10%,将 100 米以外车辆的召回率和精确度分别提高了 3% 和 7%,将摩托车的召回率提高了 5%。这是通过在我们的 200 万个视频片段自动标注数据集中实施额外的质量检查实现的。
- 通过改进低速情况下的物体运动学建模,减少宽车道和交叉路口附近物体周围的错误偏移。
- 当 FSD Beta 启用时,调整自动盲点摄像头的位置,以优先显示自动驾驶可视化。拖动摄像头以保存自定义位置。
空中召回(OTA)
包括 2022.45.15
根据最近的召回(美国召回活动 #23V085,加拿大召回活动 #2023-063),特斯拉正在对 FSD Beta 中的以下特定行为进行改进:
1.通过将决策建模为一个权衡框架,考虑到以下估计因素,改进了在某些黄灯时通过或停止的决策逻辑:停止所需的减速、进入和离开交叉路口的时间,以及在红灯转换之前穿越交叉路口的距离。这将使黄灯处理变得更加自然和人性化。
2.改进在驶入停车标志路口时的纵向减速控制剖面,使整体操作感觉更明显、更自然。
3.通过提前控制检测到的限速标志,改进了特斯拉在进入某些速度区域时的速度调节功能。根据当前速度及其与检测到的限速标志所指示速度之间的差值,确定对检测到的限速标志减速时的果断反应。在用户界面上的限速图标后增加了视觉发光,当车辆的设定速度超过检测到的限速 50%以上时,会提醒驾驶员。最后,删除了 FSD Beta 中的绝对速度限制偏移选项;只提供基于百分比的偏移。
4.更新了特斯拉在某些情况下从转弯车道继续直行的行为。现在,这些操作将被视为车道变更,转弯指示灯用于提醒其他驾驶员注意特斯拉的意图。
需要提醒的是,即使启用了 FSD Beta,驾驶员也要对车辆的操作负责。 您必须时刻注意路面情况,双手紧握方向盘,并随时准备进行干预,以确保安全。
FSD 测试版 v11.3.5
包括 2022.45.14
- 在高速公路上启用 FSD 测试版。这将统一公路和非公路上的视觉和规划堆栈,并取代使用已超过四年的传统公路堆栈。传统的高速公路堆栈仍然依赖于多个单摄像头和单帧网络,其设置是为了处理简单的车道特定操作。FSD Beta 的多摄像头视频网络和下一代计划器可实现更复杂的代理互动,减少对车道的依赖,从而增加更多智能行为,实现更流畅的控制和更好的决策。
- 通过从车队中挖掘出的额外 3 万个自动标记片段,将近距离剐蹭情况的召回率提高了 15%,尤其是在大型卡车和高偏航率情况下。此外,还扩展并调整了针对剐蹭对象的专用速度控制。
- 在宽阔的车道上改善自我的位置,向即将转弯的方向倾斜,让其他车辆可以绕过自我。
- 通过车道偏移,在高曲率或大型卡车的情况下提高操控性,以保持与道路上其他车辆的安全距离,并提高舒适性。
- 改进了在车流密集的情况下改变路径堵塞车道的行为。现在,Ego 会在受阻车道上保持更长的车距,以对冲密集车流中可能出现的空隙。
- 通过在对齐阶段允许更高的加速度,改进了密集交通情况下的变道。这样就能更自然地选择间隙,在非常接近自我的情况下超越相邻车道的车辆。
- 通过提高车道、线路和道路边缘预测之间的检测一致性,使转弯更加顺畅。这是通过将最新版本的车道引导模块集成到道路边缘和线路网络中实现的。
- 提高了检测其他车辆移动语义的准确性。在其他车辆转为行驶的情况下,精确度提高了 23%;在自动驾驶汽车错误地将其领头车辆检测为停车的情况下,错误率降低了 12%。这些都是通过增加网络中的视频上下文、添加这些场景的更多数据以及增加控制相关车辆的损失惩罚来实现的。
- 扩展了最大轨迹优化范围,使高速行驶时对高曲率道路和远距离车辆的控制更加平稳。
- 在狭窄车道上靠近一排停放的汽车时,驾驶行为有所改善,宁愿偏离车道并保持在车道内行驶,而不是不必要地变道或减速。
- 通过更好地融合视觉定位和粗略地图车道计数,改进背靠背变道操作。
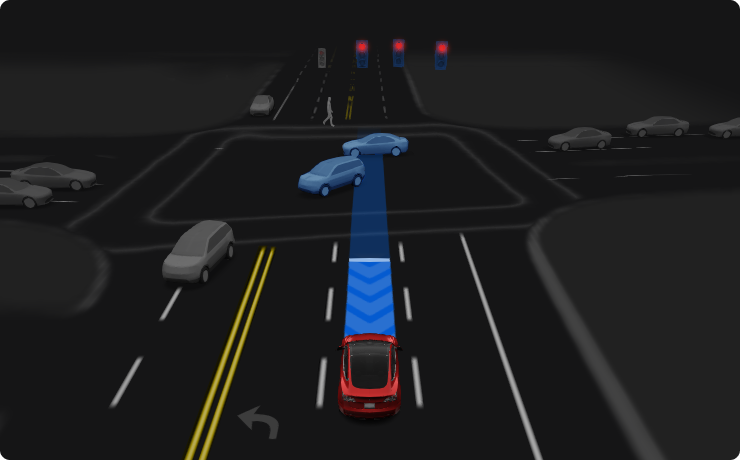
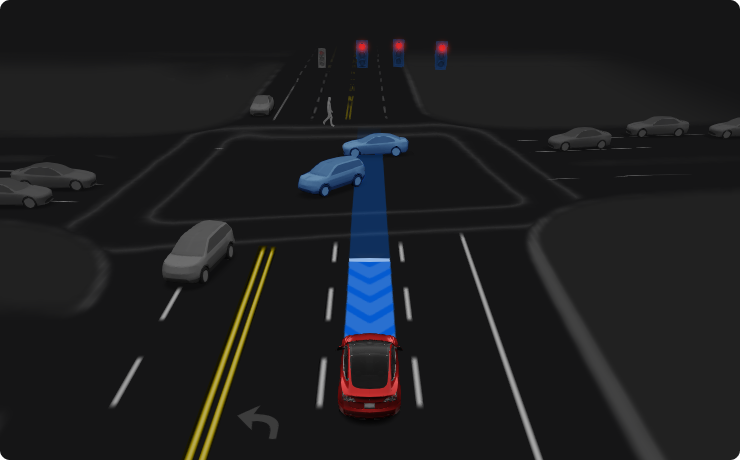
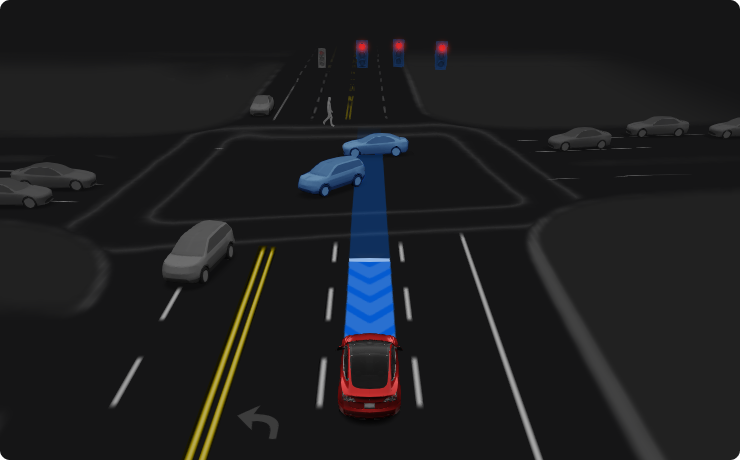
- 在用户界面中添加了文字提示,以传达 FSD Beta 计划即将进行的操作。还改进了车辆沿途即将发生的减速的可视化效果。雪佛龙会以不同的不透明度和速度呈现,以显示减速的强度,而实线则会出现在车辆即将停止的位置。
- 提高了物体检测的召回率和精确度,特别是将半挂卡车的位置误差降低了 10%,将 100 米以外车辆的召回率和精确度分别提高了 3% 和 7%,将摩托车的召回率提高了 5%。这是通过在我们的 200 万个视频片段自动标注数据集中实施额外的质量检查实现的。
- 通过改进低速情况下的物体运动学建模,减少宽车道和交叉路口附近物体周围的错误偏移。
- 当 FSD Beta 启用时,调整自动盲点摄像头的位置,以优先显示自动驾驶可视化。拖动摄像头以保存自定义位置。
空中召回(OTA)
包括 2022.45.14
根据最近的召回(美国召回活动 #23V085,加拿大召回活动 #2023-063),特斯拉正在对 FSD Beta 中的以下特定行为进行改进:
1.通过将决策建模为一个权衡框架,考虑到以下估计因素,改进了在某些黄灯时通过或停止的决策逻辑:停止所需的减速、进入和离开交叉路口的时间,以及在红灯转换之前穿越交叉路口的距离。这将使黄灯处理变得更加自然和人性化。
2.改进在驶入停车标志路口时的纵向减速控制剖面,使整体操作感觉更明显、更自然。
3.通过提前控制检测到的限速标志,改进了特斯拉在进入某些速度区域时的速度调节功能。根据当前速度及其与检测到的限速标志所指示速度之间的差值,确定对检测到的限速标志减速时的果断反应。在用户界面上的限速图标后增加了视觉发光,当车辆的设定速度超过检测到的限速 50%以上时,会提醒驾驶员。最后,删除了 FSD Beta 中的绝对速度限制偏移选项;只提供基于百分比的偏移。
4.更新了特斯拉在某些情况下从转弯车道继续直行的行为。现在,这些操作将被视为车道变更,转弯指示灯用于提醒其他驾驶员注意特斯拉的意图。
需要提醒的是,即使启用了 FSD Beta,驾驶员也要对车辆的操作负责。 您必须时刻注意路面情况,双手紧握方向盘,并随时准备进行干预,以确保安全。
FSD 测试版 v11.3.4
包括 2022.45.13
- 在高速公路上启用 FSD 测试版。这将统一公路和非公路上的视觉和规划堆栈,并取代使用已超过四年的传统公路堆栈。传统的高速公路堆栈仍然依赖于多个单摄像头和单帧网络,其设置是为了处理简单的车道特定操作。FSD Beta 的多摄像头视频网络和下一代计划器可实现更复杂的代理互动,减少对车道的依赖,从而增加更多智能行为,实现更流畅的控制和更好的决策。
- 通过从车队中挖掘出的额外 3 万个自动标记片段,将近距离剐蹭情况的召回率提高了 15%,尤其是在大型卡车和高偏航率情况下。此外,还扩展并调整了针对剐蹭对象的专用速度控制。
- 在宽阔的车道上改善自我的位置,向即将转弯的方向倾斜,让其他车辆可以绕过自我。
- 通过车道偏移,在高曲率或大型卡车的情况下提高操控性,以保持与道路上其他车辆的安全距离,并提高舒适性。
- 改进了在车流密集的情况下改变路径堵塞车道的行为。现在,Ego 会在受阻车道上保持更长的车距,以对冲密集车流中可能出现的空隙。
- 通过在对齐阶段允许更高的加速度,改进了密集交通情况下的变道。这样就能更自然地选择间隙,在非常接近自我的情况下超越相邻车道的车辆。
- 通过提高车道、线路和道路边缘预测之间的检测一致性,使转弯更加顺畅。这是通过将最新版本的车道引导模块集成到道路边缘和线路网络中实现的。
- 提高了检测其他车辆移动语义的准确性。在其他车辆转为行驶的情况下,精确度提高了 23%;在自动驾驶汽车错误地将其领头车辆检测为停车的情况下,错误率降低了 12%。这些都是通过增加网络中的视频上下文、添加这些场景的更多数据以及增加控制相关车辆的损失惩罚来实现的。
- 扩展了最大轨迹优化范围,使高速行驶时对高曲率道路和远距离车辆的控制更加平稳。
- 在狭窄车道上靠近一排停放的汽车时,驾驶行为有所改善,宁愿偏离车道并保持在车道内行驶,而不是不必要地变道或减速。
- 通过更好地融合视觉定位和粗略地图车道计数,改进背靠背变道操作。
- 在用户界面中添加了文字提示,以传达 FSD Beta 计划即将进行的操作。还改进了车辆沿途即将发生的减速的可视化效果。雪佛龙会以不同的不透明度和速度呈现,以显示减速的强度,而实线则会出现在车辆即将停止的位置。
- 提高了物体检测的召回率和精确度,特别是将半挂卡车的位置误差降低了 10%,将 100 米以外车辆的召回率和精确度分别提高了 3% 和 7%,将摩托车的召回率提高了 5%。这是通过在我们的 200 万个视频片段自动标注数据集中实施额外的质量检查实现的。
- 通过改进低速情况下的物体运动学建模,减少宽车道和交叉路口附近物体周围的错误偏移。
- 当 FSD Beta 启用时,调整自动盲点摄像头的位置,以优先显示自动驾驶可视化。拖动摄像头以保存自定义位置。
空中召回(OTA)
包括 2022.45.13
根据最近的召回(美国召回活动 #23V085,加拿大召回活动 #2023-063),特斯拉正在对 FSD Beta 中的以下特定行为进行改进:
1.通过将决策建模为一个权衡框架,考虑到以下估计因素,改进了在某些黄灯时通过或停止的决策逻辑:停止所需的减速、进入和离开交叉路口的时间,以及在红灯转换之前穿越交叉路口的距离。这将使黄灯处理变得更加自然和人性化。
2.改进在驶入停车标志路口时的纵向减速控制剖面,使整体操作感觉更明显、更自然。
3.通过提前控制检测到的限速标志,改进了特斯拉在进入某些速度区域时的速度调节功能。根据当前速度及其与检测到的限速标志所指示速度之间的差值,确定对检测到的限速标志减速时的果断反应。在用户界面上的限速图标后增加了视觉发光,当车辆的设定速度超过检测到的限速 50%以上时,会提醒驾驶员。最后,删除了 FSD Beta 中的绝对速度限制偏移选项;只提供基于百分比的偏移。
4.更新了特斯拉在某些情况下从转弯车道继续直行的行为。现在,这些操作将被视为车道变更,转弯指示灯用于提醒其他驾驶员注意特斯拉的意图。
需要提醒的是,即使启用了 FSD Beta,驾驶员也要对车辆的操作负责。 您必须时刻注意路面情况,双手紧握方向盘,并随时准备进行干预,以确保安全。
FSD 测试版 v11.3.3
包括 2022.45.12
- 在高速公路上启用 FSD 测试版。这将统一公路和非公路上的视觉和规划堆栈,并取代使用已超过四年的传统公路堆栈。传统的高速公路堆栈仍然依赖于多个单摄像头和单帧网络,其设置是为了处理简单的车道特定操作。FSD Beta 的多摄像头视频网络和下一代计划器可实现更复杂的代理互动,减少对车道的依赖,从而增加更多智能行为,实现更流畅的控制和更好的决策。
- 通过从车队中挖掘出的额外 3 万个自动标记片段,将近距离剐蹭情况的召回率提高了 15%,尤其是在大型卡车和高偏航率情况下。此外,还扩展并调整了针对剐蹭对象的专用速度控制。
- 在宽阔的车道上改善自我的位置,向即将转弯的方向倾斜,让其他车辆可以绕过自我。
- 通过车道偏移,在高曲率或大型卡车的情况下提高操控性,以保持与道路上其他车辆的安全距离,并提高舒适性。
- 改进了在车流密集的情况下改变路径堵塞车道的行为。现在,Ego 会在受阻车道上保持更长的车距,以对冲密集车流中可能出现的空隙。
- 通过在对齐阶段允许更高的加速度,改进了密集交通情况下的变道。这样就能更自然地选择间隙,在非常接近自我的情况下超越相邻车道的车辆。
- 通过提高车道、线路和道路边缘预测之间的检测一致性,使转弯更加顺畅。这是通过将最新版本的车道引导模块集成到道路边缘和线路网络中实现的。
- 提高了检测其他车辆移动语义的准确性。在其他车辆转为行驶的情况下,精确度提高了 23%;在自动驾驶汽车错误地将其领头车辆检测为停车的情况下,错误率降低了 12%。这些都是通过增加网络中的视频上下文、添加这些场景的更多数据以及增加控制相关车辆的损失惩罚来实现的。
- 扩展了最大轨迹优化范围,使高速行驶时对高曲率道路和远距离车辆的控制更加平稳。
- 在狭窄车道上靠近一排停放的汽车时,驾驶行为有所改善,宁愿偏离车道并保持在车道内行驶,而不是不必要地变道或减速。
- 通过更好地融合视觉定位和粗略地图车道计数,改进背靠背变道操作。
- 在用户界面中添加了文字提示,以传达 FSD Beta 计划即将进行的操作。还改进了车辆沿途即将发生的减速的可视化效果。雪佛龙会以不同的不透明度和速度呈现,以显示减速的强度,而实线则会出现在车辆即将停止的位置。
- 提高了物体检测的召回率和精确度,特别是将半挂卡车的位置误差降低了 10%,将 100 米以外车辆的召回率和精确度分别提高了 3% 和 7%,将摩托车的召回率提高了 5%。这是通过在我们的 200 万个视频片段自动标注数据集中实施额外的质量检查实现的。
- 通过改进低速情况下的物体运动学建模,减少宽车道和交叉路口附近物体周围的错误偏移。
- 当 FSD Beta 启用时,调整自动盲点摄像头的位置,以优先显示自动驾驶可视化。拖动摄像头以保存自定义位置。
空中召回(OTA)
包括 2022.45.12
根据最近的召回(美国召回活动 #23V085,加拿大召回活动 #2023-063),特斯拉正在对 FSD Beta 中的以下特定行为进行改进:
1.通过将决策建模为一个权衡框架,考虑到以下估计因素,改进了在某些黄灯时通过或停止的决策逻辑:停止所需的减速、进入和离开交叉路口的时间,以及在红灯转换之前穿越交叉路口的距离。这将使黄灯处理变得更加自然和人性化。
2.改进在驶入停车标志路口时的纵向减速控制剖面,使整体操作感觉更明显、更自然。
3.通过提前控制检测到的限速标志,改进了特斯拉在进入某些速度区域时的速度调节功能。根据当前速度及其与检测到的限速标志所指示速度之间的差值,确定对检测到的限速标志减速时的果断反应。在用户界面上的限速图标后增加了视觉发光,当车辆的设定速度超过检测到的限速 50%以上时,会提醒驾驶员。最后,删除了 FSD Beta 中的绝对速度限制偏移选项;只提供基于百分比的偏移。
4.更新了特斯拉在某些情况下从转弯车道继续直行的行为。现在,这些操作将被视为车道变更,转弯指示灯用于提醒其他驾驶员注意特斯拉的意图。
需要提醒的是,即使启用了 FSD Beta,驾驶员也要对车辆的操作负责。 您必须时刻注意路面情况,双手紧握方向盘,并随时准备进行干预,以确保安全。
FSD 测试版 v11.3.2
包括 2022.45.11
- 在高速公路上启用 FSD 测试版。这将统一公路和非公路上的视觉和规划堆栈,并取代使用已超过四年的传统公路堆栈。传统的高速公路堆栈仍然依赖于多个单摄像头和单帧网络,其设置是为了处理简单的车道特定操作。FSD Beta 的多摄像头视频网络和下一代计划器可实现更复杂的代理互动,减少对车道的依赖,从而增加更多智能行为,实现更流畅的控制和更好的决策。
- 通过从车队中挖掘出的额外 3 万个自动标记片段,将近距离剐蹭情况的召回率提高了 15%,尤其是在大型卡车和高偏航率情况下。此外,还扩展并调整了针对剐蹭对象的专用速度控制。
- 在宽阔的车道上改善自我的位置,向即将转弯的方向倾斜,让其他车辆可以绕过自我。
- 通过车道偏移,在高曲率或大型卡车的情况下提高操控性,以保持与道路上其他车辆的安全距离,并提高舒适性。
- 改进了在车流密集的情况下改变路径堵塞车道的行为。现在,Ego 会在受阻车道上保持更长的车距,以对冲密集车流中可能出现的空隙。
- 通过在对齐阶段允许更高的加速度,改进了密集交通情况下的变道。这样就能更自然地选择间隙,在非常接近自我的情况下超越相邻车道的车辆。
- 通过提高车道、线路和道路边缘预测之间的检测一致性,使转弯更加顺畅。这是通过将最新版本的车道引导模块集成到道路边缘和线路网络中实现的。
- 提高了检测其他车辆移动语义的准确性。在其他车辆转为行驶的情况下,精确度提高了 23%;在自动驾驶汽车错误地将其领头车辆检测为停车的情况下,错误率降低了 12%。这些都是通过增加网络中的视频上下文、添加这些场景的更多数据以及增加控制相关车辆的损失惩罚来实现的。
- 扩展了最大轨迹优化范围,使高速行驶时对高曲率道路和远距离车辆的控制更加平稳。
- 在狭窄车道上靠近一排停放的汽车时,驾驶行为有所改善,宁愿偏离车道并保持在车道内行驶,而不是不必要地变道或减速。
- 通过更好地融合视觉定位和粗略地图车道计数,改进背靠背变道操作。
- 在用户界面中添加了文字提示,以传达 FSD Beta 计划即将进行的操作。还改进了车辆沿途即将发生的减速的可视化效果。雪佛龙会以不同的不透明度和速度呈现,以显示减速的强度,而实线则会出现在车辆即将停止的位置。
- 提高了物体检测的召回率和精确度,特别是将半挂卡车的位置误差降低了 10%,将 100 米以外车辆的召回率和精确度分别提高了 3% 和 7%,将摩托车的召回率提高了 5%。这是通过在我们的 200 万个视频片段自动标注数据集中实施额外的质量检查实现的。
- 通过改进低速情况下的物体运动学建模,减少宽车道和交叉路口附近物体周围的错误偏移。
- 当 FSD Beta 启用时,调整自动盲点摄像头的位置,以优先显示自动驾驶可视化。拖动摄像头以保存自定义位置。
空中召回(OTA)
包括 2022.45.11
根据最近的召回(美国召回活动 #23V085,加拿大召回活动 #2023-063),特斯拉正在对 FSD Beta 中的以下特定行为进行改进:
1.通过将决策建模为一个权衡框架,考虑到以下估计因素,改进了在某些黄灯时通过或停止的决策逻辑:停止所需的减速、进入和离开交叉路口的时间,以及在红灯转换之前穿越交叉路口的距离。这将使黄灯处理变得更加自然和人性化。
2.改进在驶入停车标志路口时的纵向减速控制剖面,使整体操作感觉更明显、更自然。
3.通过提前控制检测到的限速标志,改进了特斯拉在进入某些速度区域时的速度调节功能。根据当前速度及其与检测到的限速标志所指示速度之间的差值,确定对检测到的限速标志减速时的果断反应。在用户界面上的限速图标后增加了视觉发光,当车辆的设定速度超过检测到的限速 50%以上时,会提醒驾驶员。最后,删除了 FSD Beta 中的绝对速度限制偏移选项;只提供基于百分比的偏移。
4.更新了特斯拉在某些情况下从转弯车道继续直行的行为。现在,这些操作将被视为车道变更,转弯指示灯用于提醒其他驾驶员注意特斯拉的意图。
需要提醒的是,即使启用了 FSD Beta,驾驶员也要对车辆的操作负责。 您必须时刻注意路面情况,双手紧握方向盘,并随时准备进行干预,以确保安全。
FSD 测试版 v11.3.1
包括 2022.45.10
- 在高速公路上启用 FSD 测试版。这将统一公路和非公路上的视觉和规划堆栈,并取代使用已超过四年的传统公路堆栈。传统的高速公路堆栈仍然依赖于多个单摄像头和单帧网络,其设置是为了处理简单的车道特定操作。FSD Beta 的多摄像头视频网络和下一代计划器可实现更复杂的代理互动,减少对车道的依赖,从而增加更多智能行为,实现更流畅的控制和更好的决策。
- 通过从车队中挖掘出的额外 3 万个自动标记片段,将近距离剐蹭情况的召回率提高了 15%,尤其是在大型卡车和高偏航率情况下。此外,还扩展并调整了针对剐蹭对象的专用速度控制。
- 在宽阔的车道上改善自我的位置,向即将转弯的方向倾斜,让其他车辆可以绕过自我。
- 通过车道偏移,在高曲率或大型卡车的情况下提高操控性,以保持与道路上其他车辆的安全距离,并提高舒适性。
- 改进了在车流密集的情况下改变路径堵塞车道的行为。现在,Ego 会在受阻车道上保持更长的车距,以对冲密集车流中可能出现的空隙。
- 通过在对齐阶段允许更高的加速度,改进了密集交通情况下的变道。这样就能更自然地选择间隙,在非常接近自我的情况下超越相邻车道的车辆。
- 通过提高车道、线路和道路边缘预测之间的检测一致性,使转弯更加顺畅。这是通过将最新版本的车道引导模块集成到道路边缘和线路网络中实现的。
- 提高了检测其他车辆移动语义的准确性。在其他车辆转为行驶的情况下,精确度提高了 23%;在自动驾驶汽车错误地将其领头车辆检测为停车的情况下,错误率降低了 12%。这些都是通过增加网络中的视频上下文、添加这些场景的更多数据以及增加控制相关车辆的损失惩罚来实现的。
- 扩展了最大轨迹优化范围,使高速行驶时对高曲率道路和远距离车辆的控制更加平稳。
- 在狭窄车道上靠近一排停放的汽车时,驾驶行为有所改善,宁愿偏离车道并保持在车道内行驶,而不是不必要地变道或减速。
- 通过更好地融合视觉定位和粗略地图车道计数,改进背靠背变道操作。
- 在用户界面中添加了文字提示,以传达 FSD Beta 计划即将进行的操作。还改进了车辆沿途即将发生的减速的可视化效果。雪佛龙会以不同的不透明度和速度呈现,以显示减速的强度,而实线则会出现在车辆即将停止的位置。
- 提高了物体检测的召回率和精确度,特别是将半挂卡车的位置误差降低了 10%,将 100 米以外车辆的召回率和精确度分别提高了 3% 和 7%,将摩托车的召回率提高了 5%。这是通过在我们的 200 万个视频片段自动标注数据集中实施额外的质量检查实现的。
- 通过改进低速情况下的物体运动学建模,减少宽车道和交叉路口附近物体周围的错误偏移。
空中召回(OTA)
包括 2022.45.10
根据最近的召回(美国召回活动 #23V085,加拿大召回活动 #2023-063),特斯拉正在对 FSD Beta 中的以下特定行为进行改进:
1.通过将决策建模为一个权衡框架,考虑到以下估计因素,改进了在某些黄灯时通过或停止的决策逻辑:停止所需的减速、进入和离开交叉路口的时间,以及在红灯转换之前穿越交叉路口的距离。这将使黄灯处理变得更加自然和人性化。
2.改进在驶入停车标志路口时的纵向减速控制剖面,使整体操作感觉更明显、更自然。
3.通过提前控制检测到的限速标志,改进了特斯拉在进入某些速度区域时的速度调节功能。根据当前速度及其与检测到的限速标志所指示速度之间的差值,确定对检测到的限速标志减速时的果断反应。在用户界面上的限速图标后增加了视觉发光,当车辆的设定速度超过检测到的限速 50%以上时,会提醒驾驶员。最后,删除了 FSD Beta 中的绝对速度限制偏移选项;只提供基于百分比的偏移。
4.更新了特斯拉在某些情况下从转弯车道继续直行的行为。现在,这些操作将被视为车道变更,转弯指示灯用于提醒其他驾驶员注意特斯拉的意图。
需要提醒的是,即使启用了 FSD Beta,驾驶员也要对车辆的操作负责。 您必须时刻注意路面情况,双手紧握方向盘,并随时准备进行干预,以确保安全。